Multi-Vehicle Collaboration for Object Transportation
Problem Description
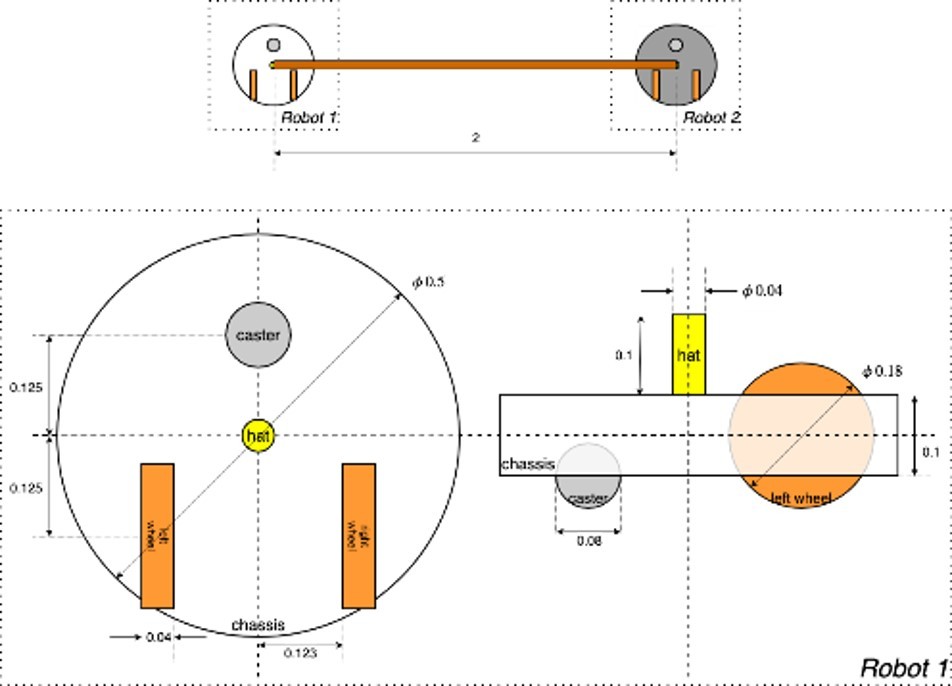
Multiple robots (as a team) jointly transport a large object to a targeted destination.
Features and Methods
- No communication among robots.
- No dynamics model nor path planning.
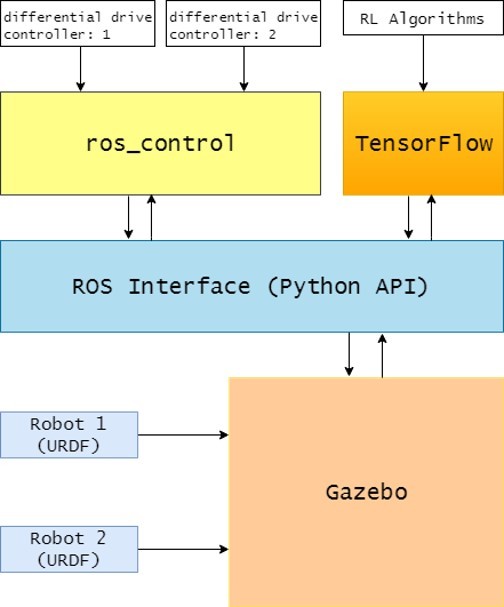
- Decentralized and reinforcement learning based control.
Result
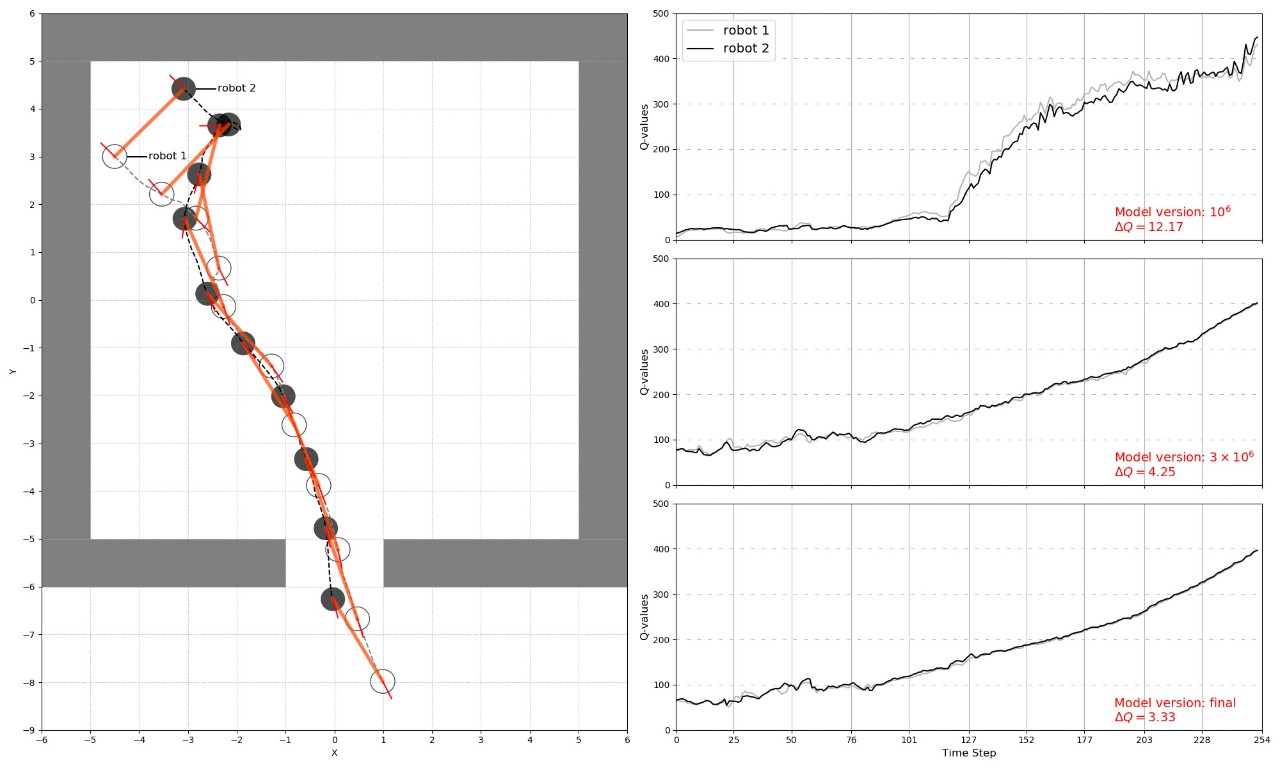
- Object delivered by collaboration of two robots with over 96% success rate.
- Robots learned how to evaluate individual’s states and actions.